致力于为用户提供成套的3D视觉应用解决方案
您值得信赖的机器视觉解决方案提供商
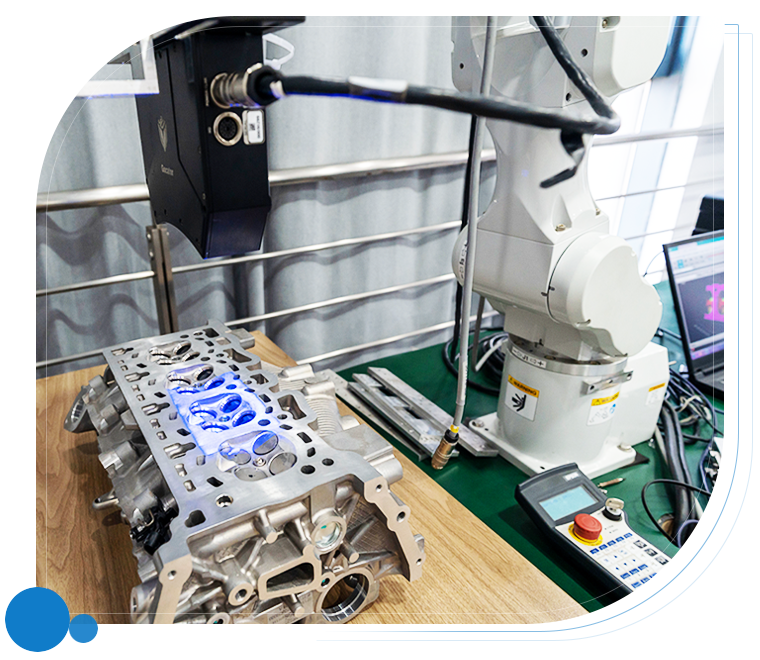
无锡鲲鹏智能图像技术有限公司成立于2018年,是一家专注于3D机器视觉技术,立足消费电子、半导体、新能源、汽车零部件、医药包装等行业,为客户提供机器视觉系统应用解决方案和成套服务体系的高新技术企业。
公司拥有强大的技术团队,能够随时应对客户的要求,实现完善、可靠的二次开发和售后服务。鲲鹏智能是国际品牌:加拿大乐姆迈(英文简称:LMI)正式授权代理商,同时也是华东地区实力非凡的3D机器视觉系统集成商。目前,鲲鹏智能被省民营科技企业协会认定为民营科技企业,已荣获国家版权局颁发的多项专利。